
Hệ Thống Cảnh Báo Điểm Mù
Hệ Thống Cảnh Báo Điểm Mù Kia Hyundai – Giải Pháp An Toàn Cho Người Lái Xe Tại Việt Nam
1. Mở đầu: Vì sao điểm mù là “kẻ thù thầm lặng” của người lái?
Trong quá trình lái xe, đặc biệt là trên đường cao tốc hoặc khi di chuyển trong đô thị đông đúc, điểm mù luôn là yếu tố nguy hiểm tiềm ẩn. Dù bạn có điều chỉnh gương chiếu hậu đúng cách, vẫn tồn tại những vùng không thể quan sát được bằng mắt thường.
Nhiều vụ tai nạn nghiêm trọng xảy ra chỉ vì tài xế không nhìn thấy xe khác trong điểm mù khi chuyển làn hoặc rẽ. Đây chính là lý do các hãng xe lớn như Kia và Hyundai đã phát triển hệ thống cảnh báo điểm mù (Blind Spot Monitoring – BSM) để hỗ trợ người lái.
2. Hệ thống cảnh báo điểm mù là gì?
2.1. Khái niệm
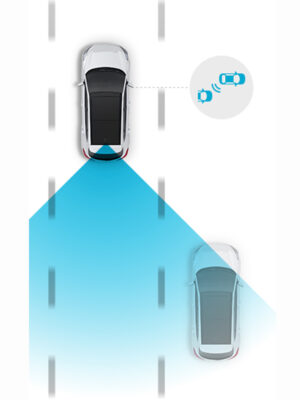
Hệ thống cảnh báo điểm mù (BSM) là một công nghệ an toàn tiên tiến, sử dụng cảm biến radar hoặc camera gắn phía sau xe để phát hiện phương tiện đang di chuyển trong vùng điểm mù của tài xế. Khi phát hiện nguy hiểm, hệ thống sẽ đưa ra cảnh báo bằng đèn LED, âm thanh hoặc hình ảnh để người lái kịp thời xử lý.
2.2. Nguyên lý hoạt động
-
Hai cảm biến radar được gắn trong cản sau.
-
Khi có xe tiến vào vùng điểm mù, radar sẽ gửi tín hiệu đến bộ điều khiển.
-
Đèn cảnh báo trên gương chiếu hậu sáng lên.
-
Nếu tài xế bật xi nhan để chuyển làn, hệ thống sẽ phát thêm cảnh báo bằng âm thanh hoặc nhấp nháy mạnh hơn.
2.3. Các dạng cảnh báo phổ biến
-
Đèn LED trên gương chiếu hậu: trực quan, dễ nhận biết.
-
Âm thanh cảnh báo: phát ra khi có nguy cơ va chạm cao.
-
Hiển thị trên màn hình trung tâm: ở những dòng xe cao cấp.
3. Lợi ích của hệ thống cảnh báo điểm mù
3.1. Nâng cao an toàn
-
Giúp người lái tránh va chạm khi chuyển làn.
-
Cảnh báo kịp thời khi có xe vượt từ phía sau.
-
Hạn chế rủi ro trong môi trường giao thông phức tạp tại Việt Nam.
3.2. Hỗ trợ lái xe nhàn nhã hơn
-
Tài xế không phải liên tục xoay đầu quan sát.
-
Giảm căng thẳng khi lái xe đường dài hoặc vào giờ cao điểm.
3.3. Gia tăng giá trị xe
-
Trang bị công nghệ an toàn cao cấp vốn chỉ có ở xe hạng sang.
-
Tạo sự khác biệt khi bán lại, dễ thuyết phục người mua hơn.
4. Thực trạng trang bị BSM trên xe Kia – Hyundai tại Việt Nam
Không thể phủ nhận rằng Kia và Hyundai đang là những thương hiệu phổ biến nhất trên thị trường Việt Nam. Tuy nhiên, hệ thống cảnh báo điểm mù không phải phiên bản nào cũng có sẵn.
-
Kia Carnival, Sorento, Hyundai Santafe: chỉ những bản cao cấp mới có BSM.
-
Kia K3, Hyundai Elantra: đa số phiên bản phổ thông không được trang bị.
-
Các dòng tầm trung: khách hàng phải bỏ thêm chi phí để độ hoặc nâng cấp.
Điều này tạo ra nhu cầu lớn về nâng cấp hệ thống cảnh báo điểm mù cho các xe Kia – Hyundai tại thị trường Việt Nam.
5. Có nên nâng cấp hệ thống cảnh báo điểm mù cho xe Kia – Hyundai?
5.1. So sánh giữa xe có sẵn và xe nâng cấp thêm
-
Xe có sẵn từ nhà máy: đồng bộ hoàn hảo, nhưng giá bán cao hơn hàng chục đến hàng trăm triệu.
-
Xe nâng cấp thêm: chi phí hợp lý hơn rất nhiều, chỉ từ vài triệu đến vài chục triệu tùy gói, nhưng vẫn đạt hiệu quả an toàn gần như tương đương.
5.2. Nâng cấp bằng sản phẩm chính hãng – giải pháp tối ưu
Để đảm bảo an toàn, chủ xe nên chọn linh kiện chính hãng Kia – Hyundai thay vì các bộ kit giá rẻ trôi nổi.
Ưu điểm sản phẩm chính hãng:
-
Độ chính xác cao, hoạt động ổn định.
-
Tích hợp đồng bộ với hệ thống điện tử của xe.
-
Bền bỉ, đạt chuẩn quốc tế về chống nước, chống bụi.
-
Có bảo hành chính hãng từ 12–36 tháng.
6. Quy trình lắp đặt hệ thống cảnh báo điểm mù chuyên nghiệp
Nâng cấp hệ thống cảnh báo điểm mù (BSM) cho các dòng Kia – Hyundai không chỉ đơn giản là “mua bộ cảm biến về rồi lắp vào”. Để hệ thống hoạt động chính xác, đồng bộ và bền bỉ, gara cần tuân thủ một quy trình kỹ thuật chuẩn.
Dưới đây là quy trình lắp đặt được áp dụng tại các gara chuyên nghiệp, có kinh nghiệm thi công nhiều dòng xe Kia Carnival, Sorento, K3, Hyundai Santafe, Elantra:
Bước 1: Khảo sát & kiểm tra xe trước khi lắp đặt
-
Xác định phiên bản xe: Mỗi dòng xe có hệ thống điện và cấu trúc khác nhau, do đó trước khi lắp đặt, kỹ thuật viên cần kiểm tra kỹ đời xe, phiên bản (Deluxe, Premium, Luxury…).
-
Tư vấn khách hàng: Giải thích quá trình lắp đặt cho khách hàng và thời gian thi công.
- Kiểm tra sản phẩm: Cho khách hàng kiểm tra sản phẩm trước khi lắp đặt, cách phân biệt phụ tùng chuẩn hãng,…
👉 Đây là bước quan trọng để đảm bảo khách hàng hiểu rõ sản phẩm, quy trình và tránh nhầm lẫn giữa hàng chính hãng với hàng trôi nổi.
Bước 2: Tháo cản sau lắp Radar
-
Tháo cản: Công đoạn này yêu cầu kỹ thuật cẩn thận, bởi cản xe thường có nhiều ngàm nhựa dễ gãy.
-
Lắp đặt Radar: Đối với cảnh bảo điểm mù chính hãng thì vị trí lắp Radar đã có sẵn trên xe, ta chỉ cần lắp đặt Radar vào đúng vị trí.
-
Đi dây điện: Toàn bộ dây sẽ được đi trong ống gen bảo vệ, đi gọn gàng theo đường điện zin của xe để đảm bảo thẩm mỹ và tránh chuột cắn.
👉 Đây là công đoạn quyết định khi lắp đặt hệ thống. Lắp sai hoặc đi dây ẩu có thể khiến hệ thống hỏng và hoạt động không chuẩn xác.
Bước 3: Tháo Tappi cửa và lắp đặt gương chiếu hậu có đèn cảnh báo điểm mù
-
Tháo tappi 2 cửa trước: Thực hiện tháo tappi cửa và tháo phần gương chiếu hậu của xe ra ngoài
-
Lắp mặt gương có cảnh báo điểm mù: Tháo mặt gương cũ và thay thế bằng mặt gương có đèn led cảnh báo điểm mù
- Đi dây điện: đi dây điện gọn gàng qua 2 cửa lên gương, với đầy đủ giắc gim chuẩn hãng
Bước 4: Thực hiện kết nối Nguồn điện và hệ thống Canbus trên xe
-
Kết nối nguồn điện
-
Kết nối nguồn điện chính xác theo sơ đồ Hãng Kia, Hyundai
-
Kết nối hệ thống Can trên xe.
-
👉 Nếu kết nối không chuẩn, hệ thống có thể báo sai hoặc gây xung đột điện với các tính năng như camera lùi, cảnh báo va chạm.
Bước 5: Căn chỉnh & kiểm tra thực tế
Đây là bước quan trọng nhất để đảm bảo hệ thống hoạt động chính xác.
-
Căn chỉnh bằng thiết bị chuyên dụng: Radar cần được coding và canh chỉnh Calibrate chuẩn xác bằng máy chuyên dụng để hoạt động chính xác và tương thích với hệ thống điện xe. Việc này nếu thực hiện không chính xác thì hệ thống sẽ không hoạt động được và đèn báo lỗi sẽ hiện lên.
-
Kiểm tra trong điều kiện thực tế:
-
Cho xe chạy trên đường thẳng, để xe khác vượt qua từ cả hai bên.
-
Thử vào cua, ra cao tốc để kiểm tra tốc độ phản ứng.
-
Test khi lùi xe để kiểm tra cảnh báo cắt ngang
-
Bước 6: Bàn giao & hướng dẫn khách hàng sử dụng
-
Giải thích nguyên lý hoạt động: Đèn LED sáng vàng khi có xe trong điểm mù, chớp nháy + kêu “beep” khi bật xi nhan mà có xe đang tới.
-
Các tình huống hệ thống hạn chế: Ví dụ xe máy chạy quá sát hoặc di chuyển chậm trong phố đông có thể không được phát hiện.
👉 Đây là bước khiến khách hàng cảm thấy yên tâm và đánh giá cao sự chuyên nghiệp của gara.
7. Những lưu ý quan trọng khi lắp đặt hệ thống cảnh báo điểm mù
Khi quyết định nâng cấp hệ thống BSM cho Kia – Hyundai, khách hàng nên lưu ý:
-
Chọn sản phẩm chính hãng
-
Tránh mua kit giá rẻ trôi nổi, thường dùng cảm biến siêu âm kém chính xác.
-
Yêu cầu gara xuất trình hóa đơn bảo hành.
-
-
Chọn gara uy tín, có kinh nghiệm
-
Gara chuyên cho dòng Kia – Hyundai, có hình ảnh, video minh chứng.
-
Có thợ kỹ thuật chuyên, lắp đặt chuẩn không cắt dây zin, không chế cháo.
-
-
Quy trình thi công rõ ràng
-
Yêu cầu gara giải thích trước quy trình lắp đặt.
-
Kiểm tra xe kỹ sau khi hoàn thành, đảm bảo không báo lỗi điện tử.
-
-
Bảo hành & dịch vụ hậu mãi
-
Sản phẩm chính hãng thường có bảo hành 12–36 tháng.
-
Gara uy tín sẽ bảo hành cả linh kiện lẫn công thi công.
-
8. Câu hỏi thường gặp (FAQ)
❓ Có cần đăng kiểm lại khi lắp BSM không?
👉 Không, vì đây là trang bị an toàn bổ sung, không thay đổi kết cấu xe.
❓ Lắp BSM có làm hết bảo hành điện của xe không?
👉 Nếu lắp đặt chính hãng, không can thiệp cắt dây điện zin thì hoàn toàn không ảnh hưởng bảo hành.
❓ Thời gian lắp đặt bao lâu?
👉 Trung bình 3–5 giờ tùy dòng xe.
❓ Chi phí lắp đặt thế nào?
👉 Tùy bộ cảm biến và xe, thường dao động từ 8–20 triệu đồng.
❓ Có thể tháo ra khi bán xe không?
👉 Có, nhưng thường không cần vì đây là tính năng gia tăng giá trị cho xe.
9. Kết luận
Hệ thống cảnh báo điểm mù Kia – Hyundai là trang bị an toàn thiết yếu mà bất kỳ chủ xe nào cũng nên cân nhắc. Thay vì bỏ ra thêm hàng chục đến hàng trăm triệu để mua bản cao cấp, bạn hoàn toàn có thể nâng cấp với chi phí hợp lý mà vẫn đảm bảo an toàn, thẩm mỹ và đồng bộ.
Điều quan trọng nhất:
-
Chỉ chọn sản phẩm chính hãng.
-
Thi công tại gara uy tín với quy trình chuẩn.
-
Sử dụng đúng cách để hệ thống phát huy tối đa hiệu quả.
Đầu tư cho hệ thống cảnh báo điểm mù không chỉ bảo vệ bạn và gia đình trên mỗi hành trình, mà còn là khoản đầu tư thông minh giúp chiếc xe Kia – Hyundai của bạn trở nên an toàn, tiện nghi và có giá trị hơn.